Help Needed and Received
|
I received help form winijenh aka. Willem Evert Nijenhuis on the ft:community forum.
Solution relies on a PID controller (reference) and a Kalman filter (reference). Please follow the link for more details, including a ready-to-use Robo Pro project file. Thank you winijenh! |
|
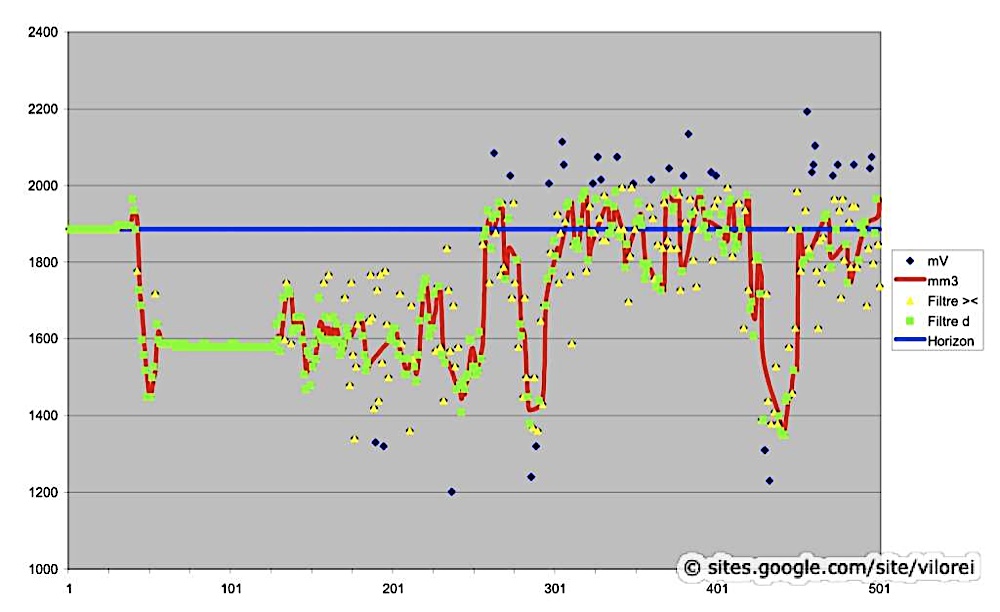
While trying to maintain the previous model horizontal, I recorded the measures from the accelerometer and applied different filters:
I was close to the equilibrium at 301, wasn't I? |
|
Now, what's missing:
Needless to say I really appreciate your help! |
