Encoder-Motor Position Management
|
Contrary to LLWin which used to provide a counter position management, Robo Pro doesn't despite the better precision brought by the encoder-motor.
|
Functional Description
|
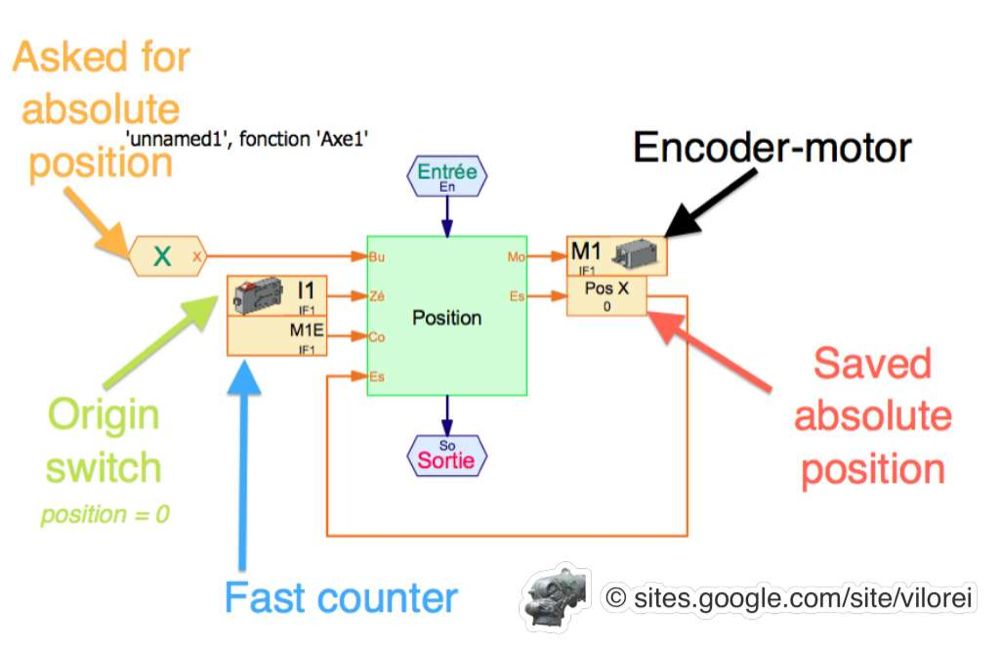
From a functional point of view, the encoder-motor position management function should:
I've developed such a function and used it extensively in my Magasin 9 and New Magasin models. |
Usage
|
Initialisation sets the point zero or origin.
|
Going back-and-forth is possible, since the absolute position is saved.
|
|
|
Settings
|
Inside the function Axe1, you need to specify:
|
|
|
In case of having multiple axis, just duplicate Axis1 to Axis2 and update the settings listed above.
The real function is inside Position, and rather elaborate. The full detail of the Position function is provided on the file enclosed. |
Download
|
Download the driver with an example for RoboPro.
This file is under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. |
| ||
