smartIMU
|
This project is shared with the Embedded Computing website, as the whole development is carried out with the tools I use for embedded computing.
The 519143 Robotics Competition Set features a new I²C sensor, the gyro-sensor (reference 158402) based on a BMX055. |
|
Functional Description
|
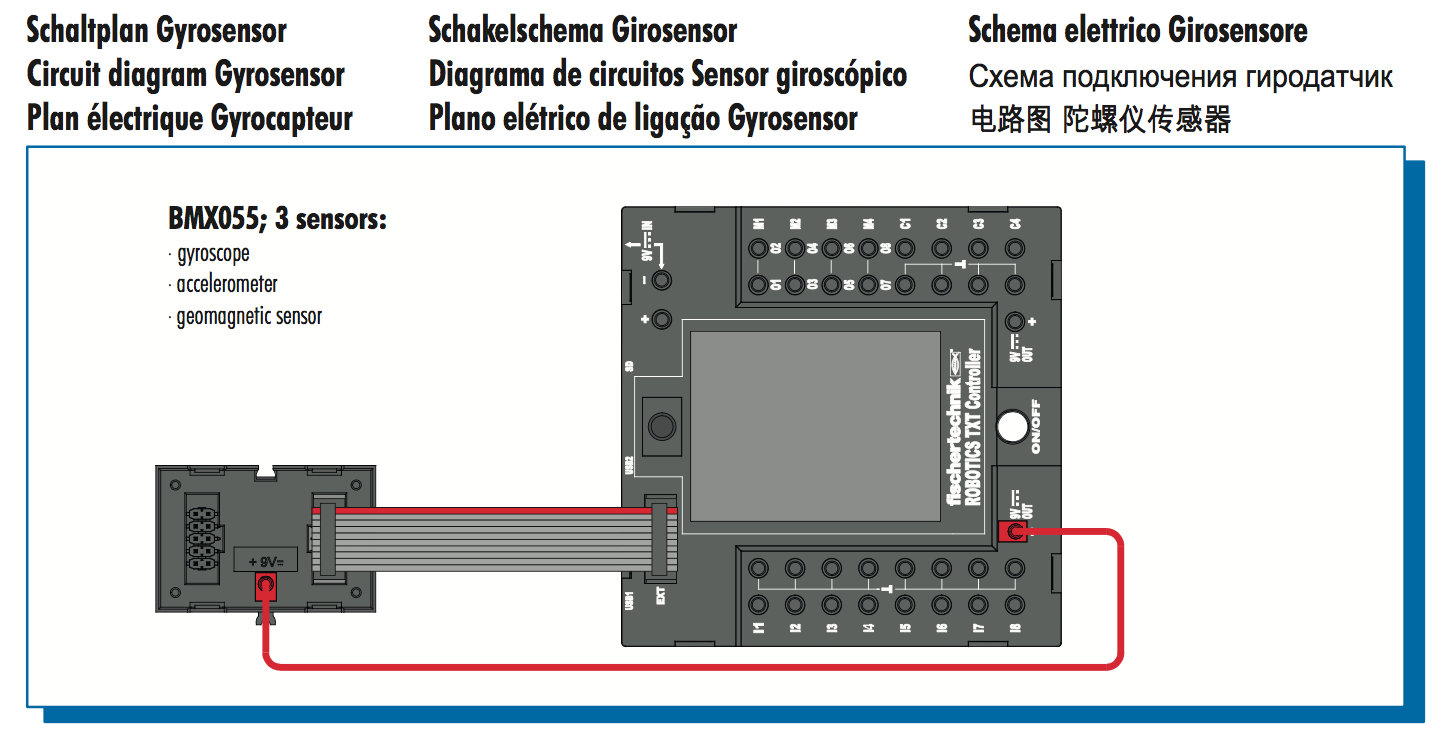
The BMX055 (data-sheet) by Bosch SensorTec combines 9-DOF IMU (9 degrees of freedom inertial measurement unit) with a 3-axis acceleration sensor, a 3-axis gyroscope and a 3-axis geomagnetic sensor.
However, it only provides raw data, and does not include any MCU to fusion data and compute angles. Another sensors on the extensive range of Bosch SensorTec are the BNO055 (data-sheet) and BNO080 (data-sheet), which offer the same 9-DOF IMU but include a built-in Cortex-M0+ MCU for data fusion and angle computation, including Euler angles, quaternion, rotation vector, linear acceleration. The smartIMU sensor is based on this range of sensors. |
|
Commands
|
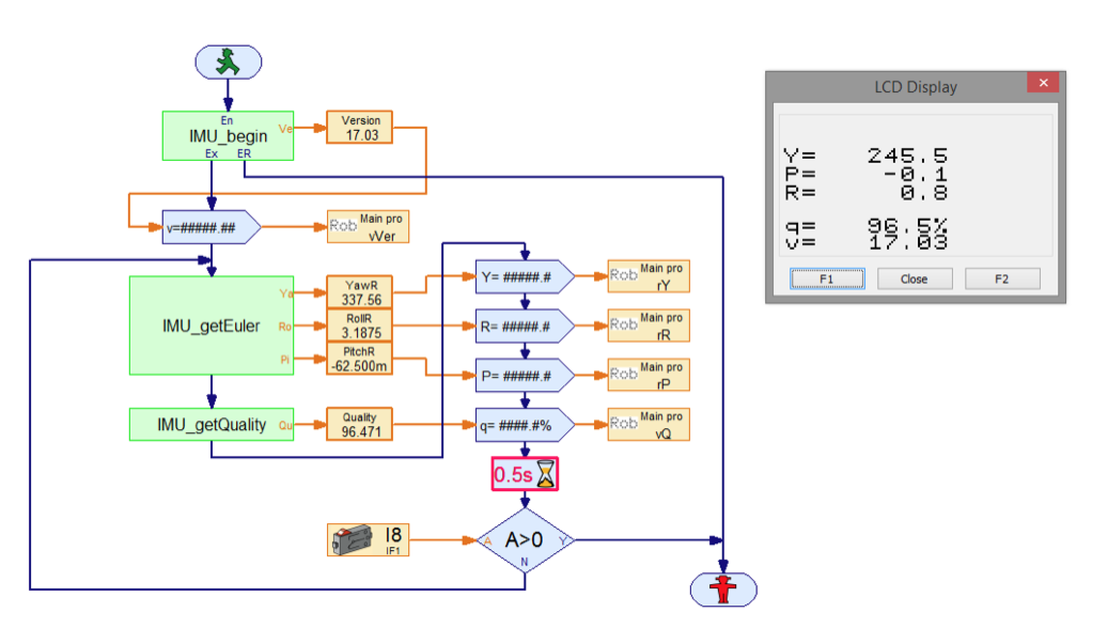
The smartIMU relies on a limited set of commands:
|
|
First Prototype
|
The prototype was built on a breadboard and tested with a MCU-based board, then with the RoboTX controller.
The sensor worked fine on the first test. |

|
Finalised and Working Sensor
|
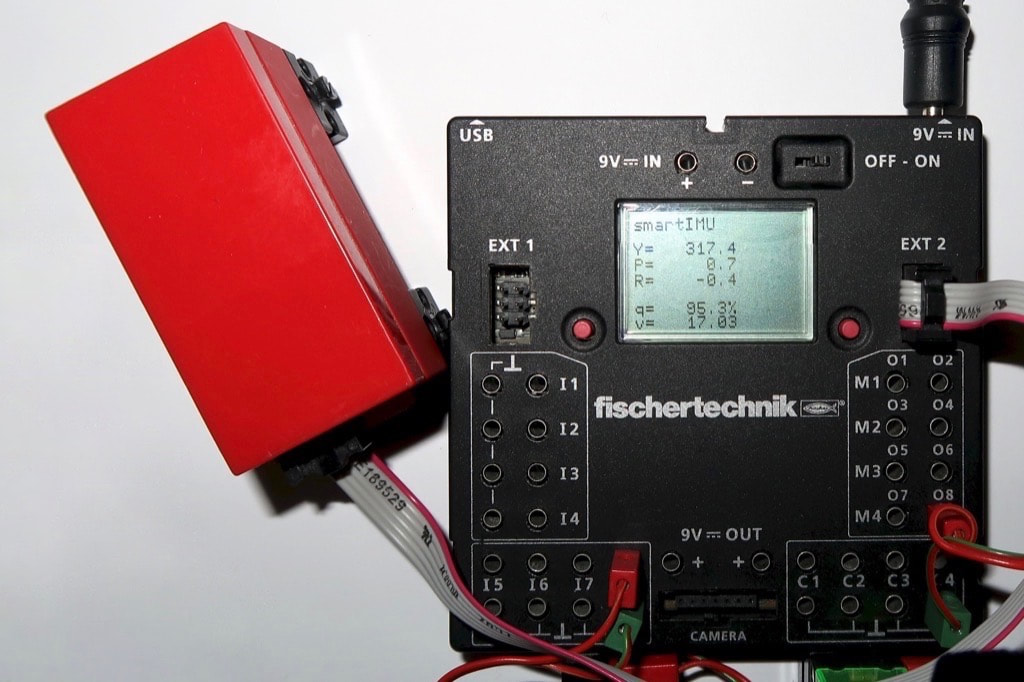
The sensor is finalised, integrated into a standard fischertechnik 9 V battery box and working!
|
|
