Robo Pro
|
Robo Pro is the graphical environment used to develop the programs for the Robo TX controller.
There're always missing functions. When they are developped, Robo Pro offers to save them in the Personal Library for later re-use. Based on my previous experiences with programming, which relied mostly on components, I'm trying to build my own library I could easily re-use. In doing so, I could speed up the development of a new project and avoiding painful debugging and tweaking. For I²C devices, please go to this specific section. |
|
Shared Functions
Share functions are grouped into four main categories:
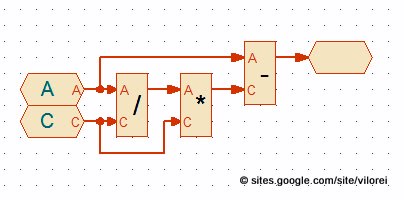
Value Operations
|
Variable Types
|
