I²C Inertial Measurement Unit smartIMU
|
The smartIMU sensor combines a 3-axis acceleration sensor, a 3-axis gyroscope and a 3-axis geomagnetic sensor with a MCU.
The MCU performs data fusion and computes angles, including Euler angles, quaternion, rotation vector and linear acceleration. |
|
Device
|
• Caution |
Functions
|
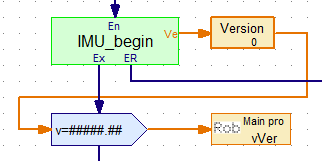
The smartIMU relies on a limited set of commands.
|
|
IMU_begin checks the I²C connection with the sensor and initialises the sensor.
IMU_setConfiguration configures the units and orientation of the IMU
|
|
|
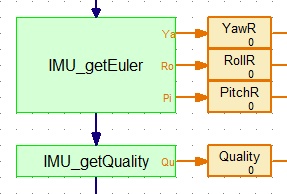
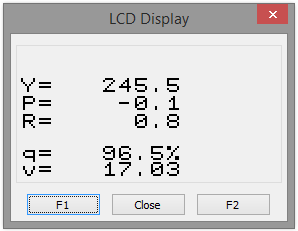
IMU_getEuler gets the Euler angles (roll, pitch and yaw)
IMU_getLinearAcceleration gets the linear acceleration on the x, y and z axis
IMU_getGravityVector gets the gravity vector on the x, y and z axis
IMU_getQuaternion gets the quaternion
IMU_getAccelerometer gets the acceleration data
IMU_getGyroscope gets the gyroscope data
IMU_getMagnetometer gets the magnetometer data
|
|
Download
|
Download the driver with an example for RoboPro.
This file is under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. |
