Multi-Tasking End Management Procedure
|
One of the great features of Robo Pro is the very easy multi-tasking programming.
However, there's no mechanism supplied to end all tasks. Here's one end management procedure, consisting on two functions:
|
Example
|
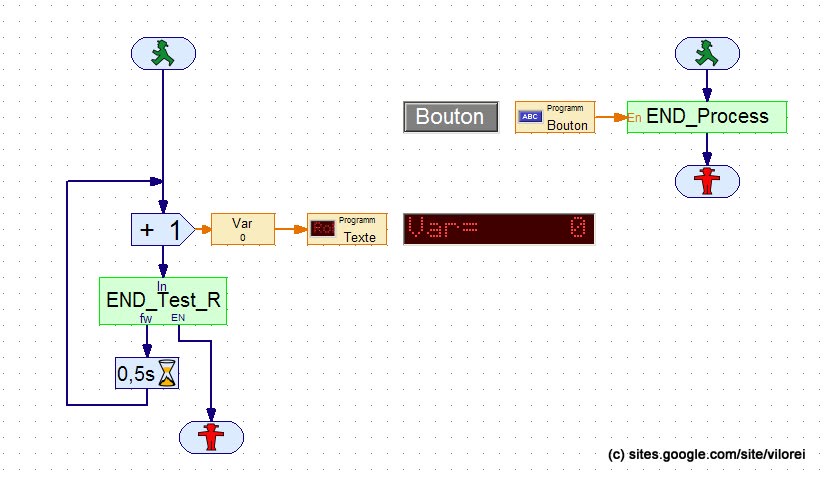
Here's a standard example with two processes:
|
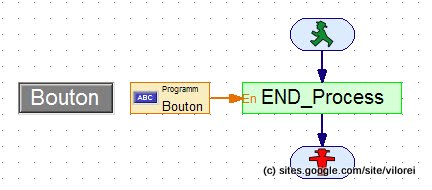
Process on the Main Program
|
This process is compulsory in the main program. It launches the END_Process function and defines the input to check.
Here, a software button Bouton is used. Very often on my projects, I used a switch connected to the i8 input. |
|
|
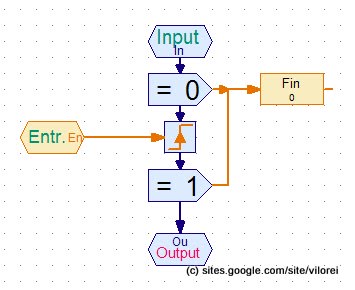
The END_Process function just checks the input defined and,if so, sets the Fin variable to 1.
|
|
Function on Each Loop and Each Process
|
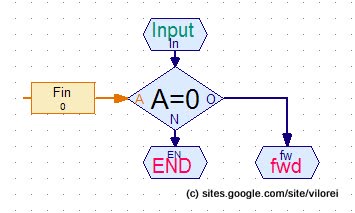
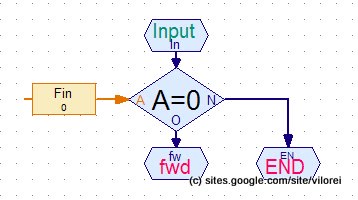
Each loop and each process shall include either END_Test_L or END_Test_R function.
This function checks the value of the Fin variable and redirect the to the output accordingly:
In order to avoid messy projects, two flavours are supplied:
|
|
|
|
Download the driver with an example for RoboPro.
This file is under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. |
| ||
