I²C Stepper Motor Controller AMIS-30624
|
The AMIS-30624 from On Semiconductor is a stepper motor controller. It is compatible with the TCM-222 which driver is included with Robo Pro 3.1.3.
Stepper motors offer great precision and advanced features. |
• Caution |
|
The new release allows to manage two AMIS-30624 controllers, AMIS1 stands for 0x60 and AMIS2 for 0x61.
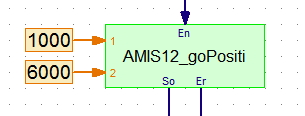
It also fixes a bug when going from a negative to a positive position (or from a positive to a negative position) by stopping at 0. New commands starting with AMIS12 manage both axis. |
|
Device
|
FunctionsInitialisation
AMIS_begin Wake up and initialise the stepper controller
AMIS_goReference Seek for the reference position given by the switch connected to the stepper controller and set it as secure position = 0. The reference position is needed for calibration.
AMIS_setParameters Define default parameters, for example speed, with commonly used values
Normal usage AMIS_goPosition Go to the target position defined by the coordinate
AMIS_goSecurePosition Go to the secure position. Same as AMIS_goPosition with coordinate = 0
AMIS_hardStop Hardware stop. Very useful in case of emergency
Information functions AMIS_getStatus Retrieve current dynamic status. Used by AMIS_goReference and AMIS_goPosition
AMIS_getPosition Retrieve the coordinates of the actual, target and reference positions
Advanced functions AMIS_setSecurePosition Go to the target position defined by the coordinate and set it as the new secure position. This functions allows to have a secure position different from the reference position used for calibration.
AMIS_resetPosition Define the current position as = 0
AMIS_softStop Software stop
Utility readBit Utility. Return the value of the specified bit from the value
goInterim This function fixes the bug when going from a negative to a positive position (or from a positive to a negative position) by stopping at 0. |
Download
|
Download the driver with an example for RoboPro.
This file is under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. The driver is included in the RoboPro distribution, under the Element groups > Library > I²C tree. |
