smartCamera
|
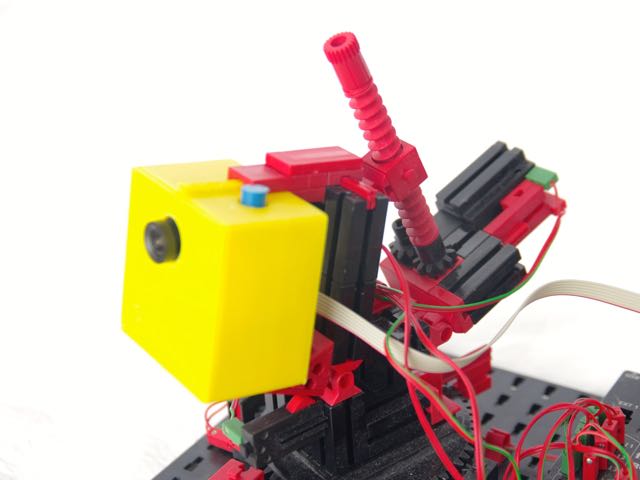
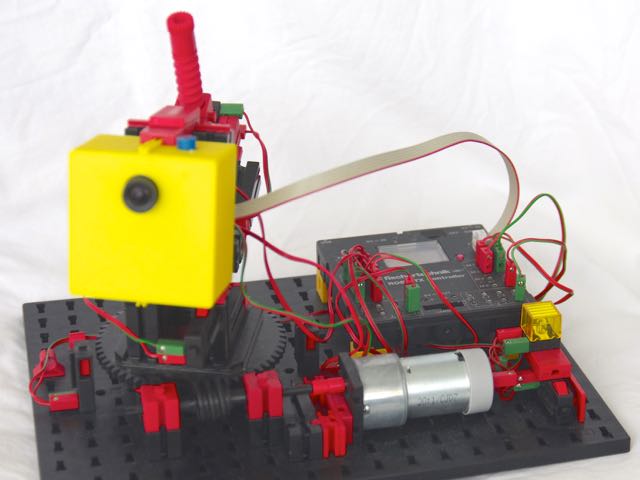
This sensor is a colour camera that identifies objects and patterns. It was show-cased at the ft Convention held September 28, 2014.
The camera sends the coordinates of the identified object to the Robo TX controller through the I²C bus. The customised casing was 3D-printed. The smartCamera has evolved into the smartNewCamera and is smarter now! |
|
Functional Description
|
Now, what is this sensor for?
The goal is to recognise and locate objects. Actually, I don't need to recognise any possible objects but only those I'm looking for and I've previously defined. Defining the objects for later recognition should be easy and should be memorised even if the sensor is switched off. Along with the object being recognised, I'd like also to have an idea of the position and the size of the object. The sensor would be connected through I²C to the Robo TX controller and should fit into a standard fischertechnik box, like the 60x60x30 mm in yellow or red (reference 32076 or 130961). The commands should be limited and easy to deal with, as a driver for the sensor is required. |
|
Commands
|
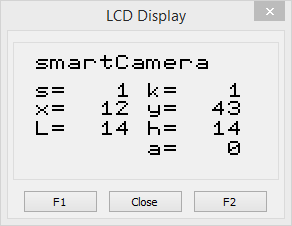
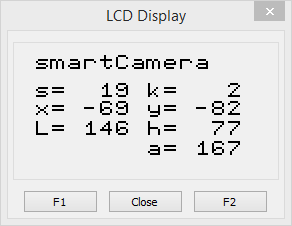
Based on the functional specifications, only three commands are used:
The I²C Smart Sensor smartCamera page provides more details about the commands and the RoboPro visual interface. |
|
Using the smartCamera
|
To define the elements to be recognised,
The library runs fine on both debug mode and stand-alone mode, at standard and high I²C speed, 100 kHz and 400 kHz. Finalised and Working SensorThe sensor is finalised and integrated into a 3D-printed case compatible with fischertechnik.
|
|
