Electro-Pneumatic Set
|
The models included in this set are very interesting. I really appreciate the wide range of applications for compressed air and pneumatics.
The new compressor delivers a steady flow of compressed air and represents a welcome and highly anticipated update of the previous compressor. Unfortunately, I've experienced some issues with two models: the colour sorting robot and the ball obstacle course with vacuum picker arm. Two issues... two solutions!
|
Colour Sensor
|
The colour sensor remains unchanged and still relies on a red LED. No surprise, white and red cylinders are often misread and confused.
Also enters into account the tear and wear of the cylinders. As the painting becomes less white, the colour isn't recognised accurately. Is the true colour sensor the only capable solution? |
|
The tool we're going to use is the normal distribution, and more specifically, the fact that the [ x̅ - 3∙σ, x̅ + 3∙σ ] interval (or 6 sigma) represents 99,7% of the population.
To learn more, please refer to the article about Normal distribution at Wikipedia. |
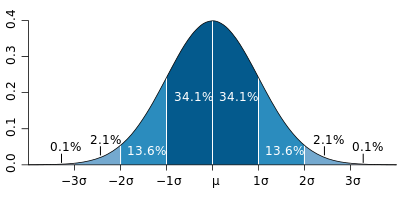
Picture from Wikipedia
|
|
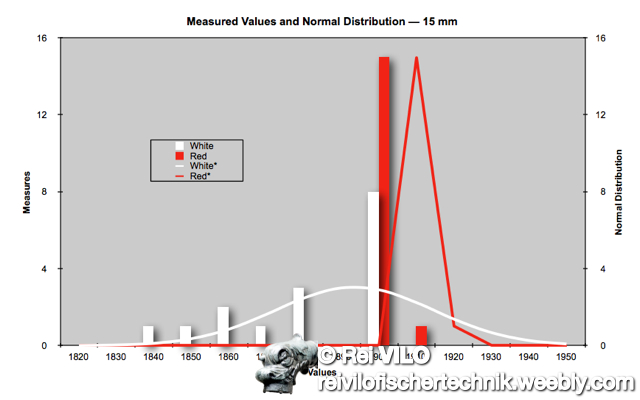
We're going to check that the normal distributions of the white and red colours don't overlap, i.e. the intersection of both intervals is close to empty.
|

|
With the default casing around the colour sensor described as per the manual, the distance between the colour sensor and the cylinder is 17 mm, with
|

|
|
I measured again the values for the 2 faces of the 8 white cylinders and 8 red cylinders I own and calculated the new threshold values. The normal distribution of the measures speaks by itself.
|
|
|
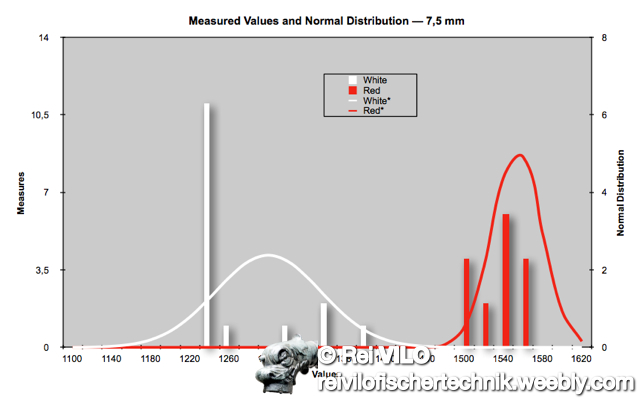
By changing two building blocks 15 reference 32881 for two building blocks of 7,5 mm reference 37468, the new distance between the colour sensor and the cylinder goes down from 17 to 9,5≈10 mm, with
I performed the same measures with the white and the red cylinders as I did before. The colours are now clearly differentiated and the confidence zones based on the normal distribution no longer overlap. The wear and tear of the cylinders is not longer an issue. The tests I performed were accurate at 100%. The process is thus fully capable. |
|
|
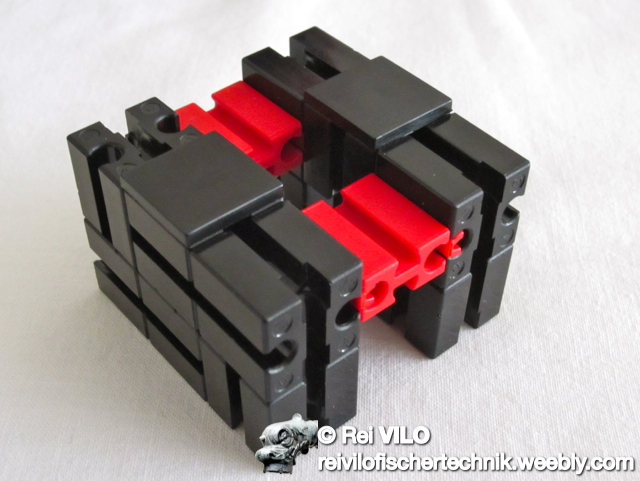
Only five additional elements are required:
One building block of 7,5 mm is freed from the initial instructions and reused on the new casing. |

|
|

|
|
The colour sensor within its new casing offers greater precision.
This implies new threshold values. I have updated the Robo Pro program colour_sorting_robot_-_standard_10mm.rpp accordingly. |
|
Rotary Motor
|
For both the colour sorting robot and ball obstacle course with vacuum picker arm, the rotary arm runs too fast and the pulse counter C1 can't provide enough precision.
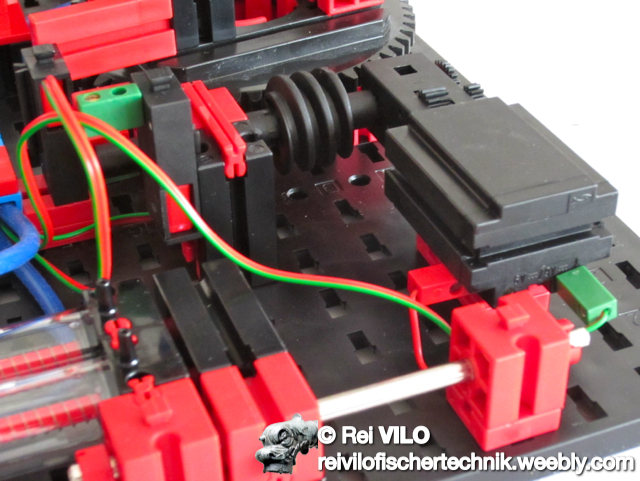
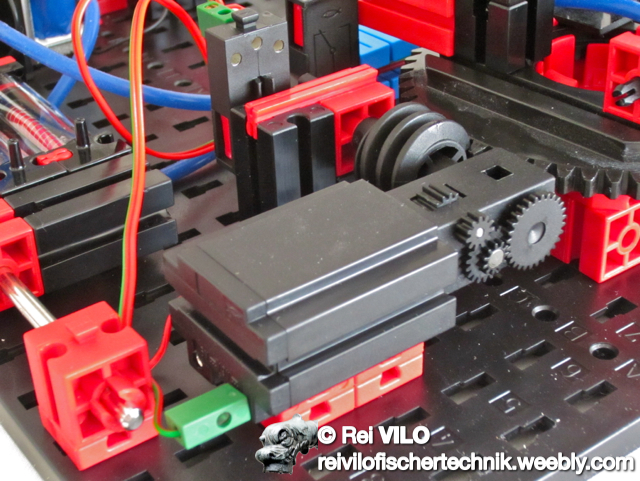
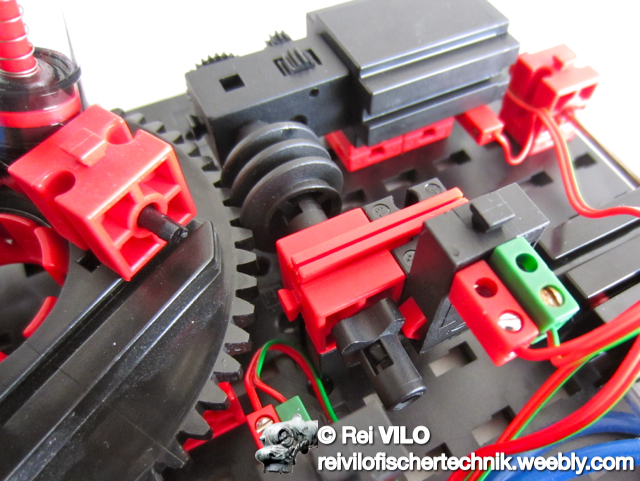
Adding one single element, the worm reference 35072, solves this issue. |

|
|
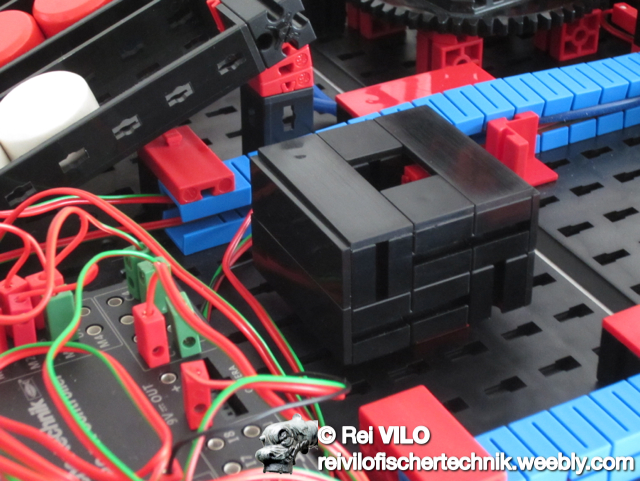
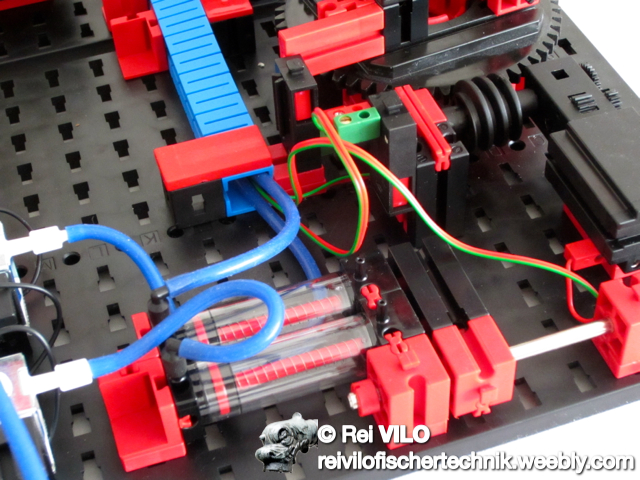
The implementation is easy and frees many elements. The vacuum generator needs to be moved.
The pictures below illustrate the new configuration. |
|
|
|
|
|
The new values for the pulse counter need to be changed.
The Robo Pro programs below include the new values for the colour sorting robot and ball obstacle course with vacuum picker arm. |
New Programs
Colour sorting robot model
|
| ||
|
| ||
Ball obstacle course with vacuum picker arm
|
| ||
