smartControls
|
This project is shared with the Embedded Computing website, as the whole development is carried out with the tools I use for embedded computing.
This part in more functional oriented. The smartControls is the most ambitious smartDevices project as it combines both an actuator and a sensor. |
Functional Description
|
There's a strong need for a central control panel on complex models, acting as a user interface. There's already the very interesting project RoboTXdroid featuring Bluetooth on an Android phone. I'm facing two issues: I don't have an Android-based phone and RoboTXdroid doesn't work with my iPhone. So I'm looking for a dedicated device.
This control panel is first a display for texts, numbers and even provides graphics, like a gauge or a radar. But it is also an input device as the screen features touch and the interface provides buttons, cursors and tables. Response time should be fast enough for an acceptable responsiveness. Going further, a slot for SD-card would allow saving and retrieving data, for example from lists, and also writing log files, including text and numbers. The device would be connected through I²C to the Robo TX controller and should fit into the red power block (reference 30263) case. The commands should be easy to deal with, with a ready-to-use driver for Robo Pro. I think I've listed all the specifications I'm looking for. |
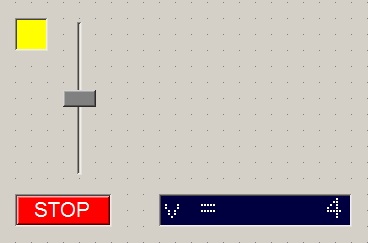
Instead of that on your PC...
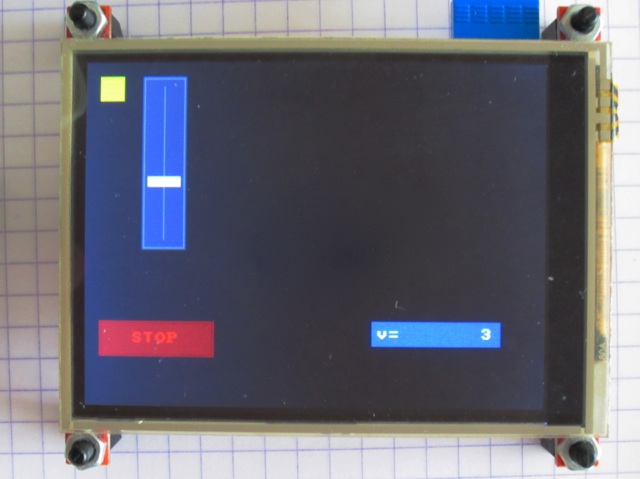
...Enjoy this on your fischertechnik model!
|
Interface Commands
|
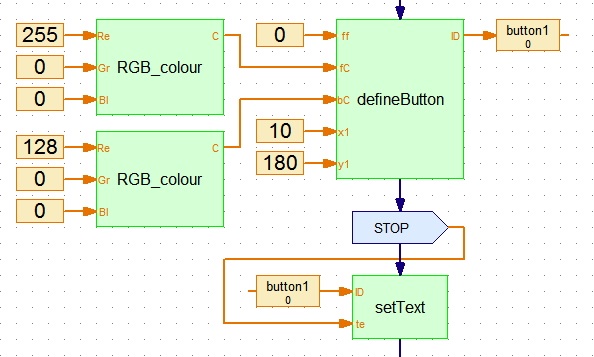
Based on the functional specifications, I've defined three groups of commands for the smartControls device:
The device comes with ready-to-use interactive controls. As an example, the red stop button requires two modules only: sC_defineButton and sC_setText. |
|
Build the InterfaceThe Define mode prepares the elements of the interface, both passive as background colour, labels... and active as text box, cursor, button controls...
|
Run the Interface
Once the interface is ready, the user switches to the Run mode to activate the touch and the interactions with the user.
|
Write and Read FilesThe files writing and reading functions are given the highest priority, because SD-card is slow.
|
|
Prepare the screen
Change mode
Define passive elements
Define active controls
Prepare active controls
|
Change mode
Get feed-back
Manage active controls
|
Manage the SD-card
|
|
The I²C Screen With Touch and SD-Card smartControls page provides more details about the commands and the RoboPro visual interface.
|
Prototypes
|
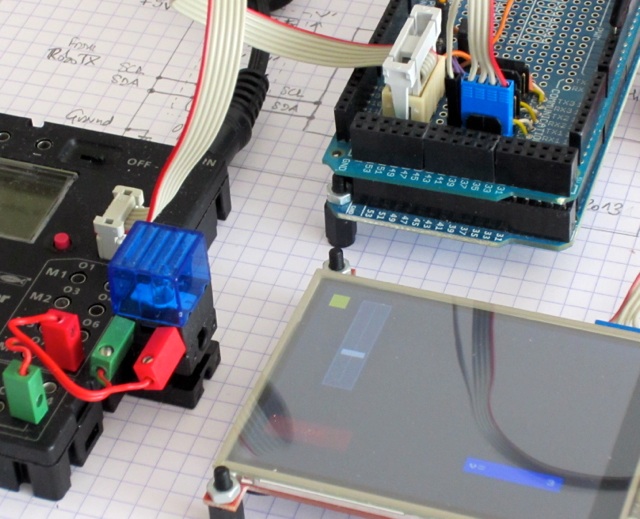
A first prototype is already working fine.
This prototype corresponds to the second step, with the RoboTX as master and a standard board as slave. |
|
Finalised and Working Device
|
The final product is ready and working.
It was presented it at the ft Convention 2013, with two models:
|
|
smartControls 2014 Edition
|
The smartControls 2014 Edition brings a larger screen, a wider set of functions and a faster I²C connection to the RoboTX.
Standard screen is now 800x480 pixels 5" wide with touch. The SD-card slot allows to write and read values to and from files. New elements include bar, bar-graph, yaw, pitch and roll displays, a clock and a menu. The smartControls 2014 Edition also features a faster I²C connection running at 400 kHz. The first prototype is already working. Next steps will focus on integration with the fischertechnik system. I plan to showcase it at the Convention 2014. |
