TXT 4.0 Controller
|
Announced early 2021 at the Nuremberg Toy Fair, the TXT 4.0 Controller is the last iteration from fischertechnik, actually the 5th. After the Intelligent Interface, the Robo Interface (which I didn't use), the RoboTX and the Robotics TXT, this is the 4th generation I play with.
It comes with a new development environment, Robo Pro Coding, with blocks and Python, and powerful IoT tools, with MQTT and Node-RED. The TXT 4.0 Controller was sampled by fischertechnik. |

|
Hardware
|
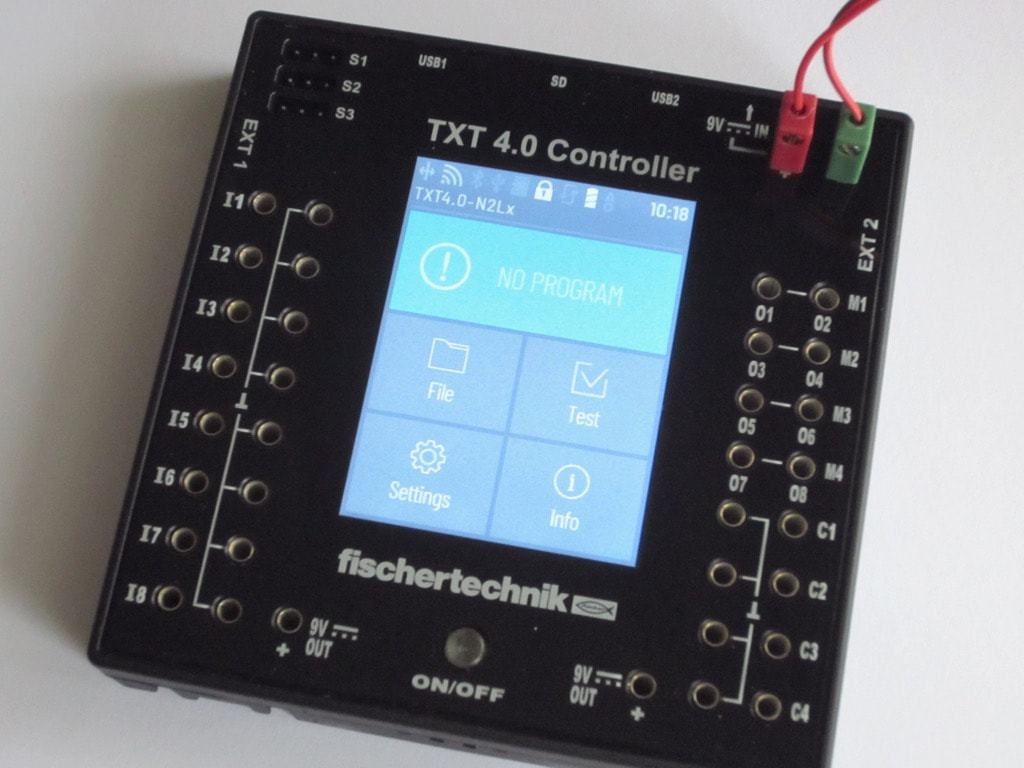
The TXT 4.0 Controller keeps the same form-factor as previous RoboTX and Robotics TXT and adds 3 servo outputs to the existing 8 universal inputs, a combination of 4 dual outputs for motors or 8 single outputs for lamps, and 4 faster counter inputs. The IR receiver has been removed.
It keeps a microSD-card slot, a USB port for the camera, two extension ports and turns the touch screen from resistive to capacitive. The new controller keeps the same multi-core configuration with a processor and a controller, common for industrial applications. |

From left to right: power jack plug, mini-USB for PC,
microSD-card slot, USB for camera |
|
The screen has the same size with a redesigned menu system, with a better organisation of the options and a more modern look. Now capacitive, the touch is very responsive.
However, the interface is hard to read. The fonts are really small and the contrast is rather limited, with light gray text on dark grey background. Using bold face and white-on-black could easily improve the experience. |
|
|
There's also a 6-pin expansion port, with power and I²C bus.
An adapter is available for the I²C bus to use previous generation sensors with 10-pin connectors, like the environmental sensor. Despite the same 6-pin form-factor initiated by the RoboTX, the new I²C plug is not compatible. The new I²C plug features a different pin-out and operates at 3.3V instead of +5V. |
|
Software
|
Apart from the incremental hardware update, the software inaugurates a brand new development environment, named Robo Pro Coding. The software runs now on all platforms, including Windows, macOS, Linux, iOS and Android.
It features two programming modes: a graphical mode based on blocks, and a text mode. The underlying language is Python. When creating a new project, the first step consists on selecting the environment:
Since release 6.2.0, Robo Pro Coding supports the Bluetooth Smart Controller as well. |
|
Blocks
|
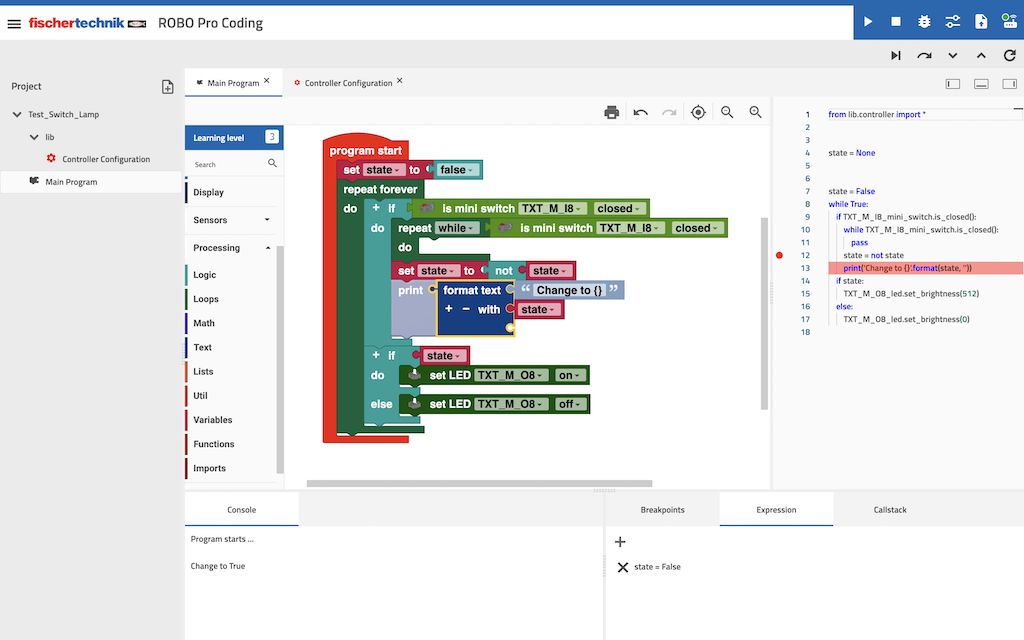
On the graphical mode, the main window shows four areas:
|
|
|
The first step is to select the controller and configure all the inputs and outputs, including I²C devices, camera and servos.
Then writing the program can start. The blocks are grouped by functions with dedicated colours. Two paradigms are accepted: procedural programming and event-based programming. Here, the same application, a flip-flop light, is performed using a loop and using an event. |
|
|
Even with the block editor, complex calculations can be performed in Python inside dedicated blocks, as in MatLab and LabView.
This is something I have been asking for for a long time. A special tab allows to draw the screen with multiple read-to-use widgets. A console is also available. Debugging offers breakpoints, variable monitoring and call stack. |
|
Python
|
The Robo Pro Coding displays on the right pane the translation of the program into Python.
However, I couldn't find any documentation about Python and most importantly, about the underlying libraries and SDK. |
|
Ready for IoT
|
I discovered that the TXT 4.0 runs an MQTT broker and a Node-RED server natively.
This is the perfect IoT configuration to design a dashboard and control a model. In the example shown here, the dashboard displays the value of the slider, controls the lamp, and sends the date and time. The screen on the TXT 4.0 displays the date and time received, and sends the value of the slider. |
|
Voice control
|
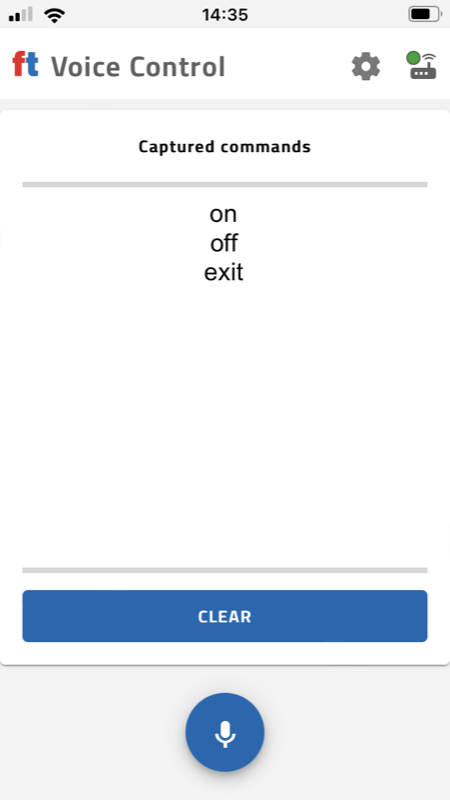
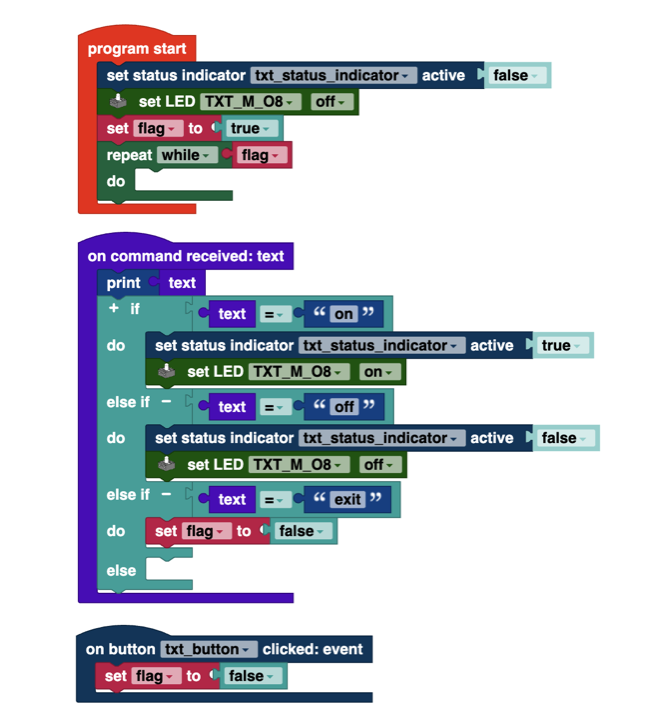
Another interesting option is the voice command through a smartphone.
It requires to install the Voice Control application on an Android or iOS smartphone, define key words with the on command received block on a Robo Pro Coding project, and connect both to the TXT 4.0 controller. In the example shown, three words are defined: 'on' to turn the external LED on; 'off' to turn it off; and 'exit' to quit. Now, the process is rather slow. |
|
|
Cloud services
|
No modern solution of hardware and software is complete without cloud services.
fischertechnik offers at least three cloud services:
However, I've experienced some issues trying to connect to each of those services. The main fischertechnik website also provides an complete e-learning section devoted to the TXT 4.0. |
|
Conclusion
|
With the new Robotics TXT 4.0 controller, the Robo Pro Coding software and the cloud services, fischertechnik brings an integrated and consistent system.
This new iteration addresses most of the comments and includes many ideas done on the previous generations. As the Robotics TXT 4.0 has just been launched, documentation is not yet fully available. I hope fischertechnik will provide very soon a full documentation of the Python libraries, and a programming expert kit as it did for the RoboTX and the Robotics TXT controllers. I'll update this review when the new resources are available. |

|
Pros
|
Cons
|
Wrap-Up
|
Links
|
Posted: 27 Dec 2021 Updated: 02 Jan 2022, 14 Oct 2023 |

|
