smartColours
|
This project is shared with the Embedded Computing website, as the whole development is carried out with the tools I use for embedded computing.
This part in more functional oriented. The first smart sensor I'm working on is a colour recognition sensor, called smartColours. |
Functional Description
|
Now, what is this sensor for?
The goal is to read colours. Actually, I don't need to read all the colours but only to recognise one colour among a set of previously defined ones. Defining the colours for later recognition should be easy and should be memorised even if the sensor is switched off. Let's set a goal of 16 colours. Along with the colour being recognised, I'd like also to have an idea of the quality of the recognition or a level of confidence. The sensor would be connected through I²C to the Robo TX controller and should fit into a 9V red battery box (references 32263 and 32958). The commands should be limited and easy to deal with, as a driver for the sensor is required. I think I've listed all the specifications I'm looking for. |
|
Commands
|
Based on the functional specifications, I defined three sets of commands:
The sensor comes calibrated for four colours, blue, red, white and empty. |
Standard Usage
In normal usage, only three commands are used:
|
First Time Usage
If required, the sensor may need to be adapted to a specific environment. Here are the commands to learn the colours and save them for later reuse.
|
Optional Usage
Those functions increase the usage of the sensor.
|
|
|
|
|
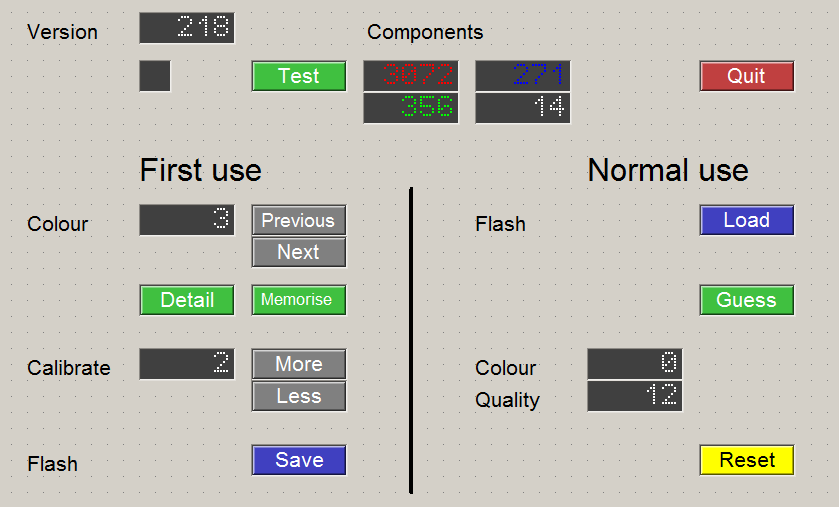
The I²C True Colours Smart Sensor smartColours page provides more details about the commands and the RoboPro visual interface.
|
|
First Prototype
|
The first prototype was built in three steps, as detailed here.
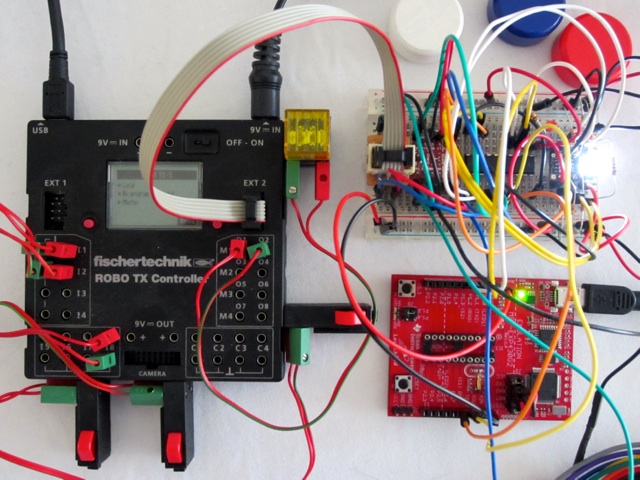
Behind the cables, the I²C plug and logic level converter, the MCU and the sensor are on the prototype board (top right). The MCU board (bottom right, in red) provides the power unit, the reset circuit, the uploader and the debugger. The tests proved successful.The sensor answered in due time to all the I²C requests from the TX controller (left, in black), with a rate for positive recognition of the colours close to 100%. Next step is the integration into a fischertechnik 9 cm x 3 cm box for the final product! |
|
Finalised and Working Sensor
|
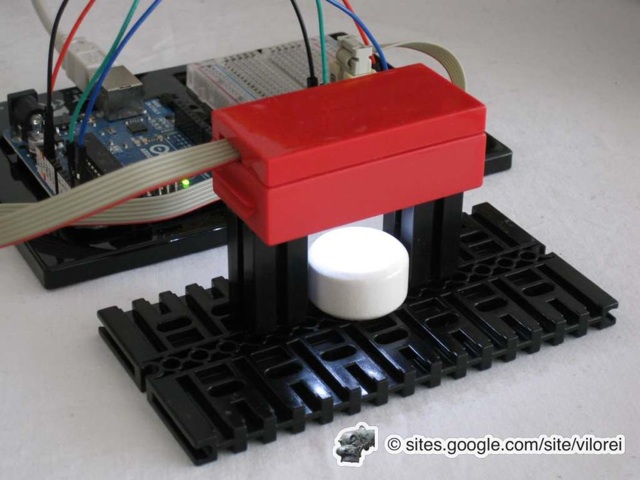
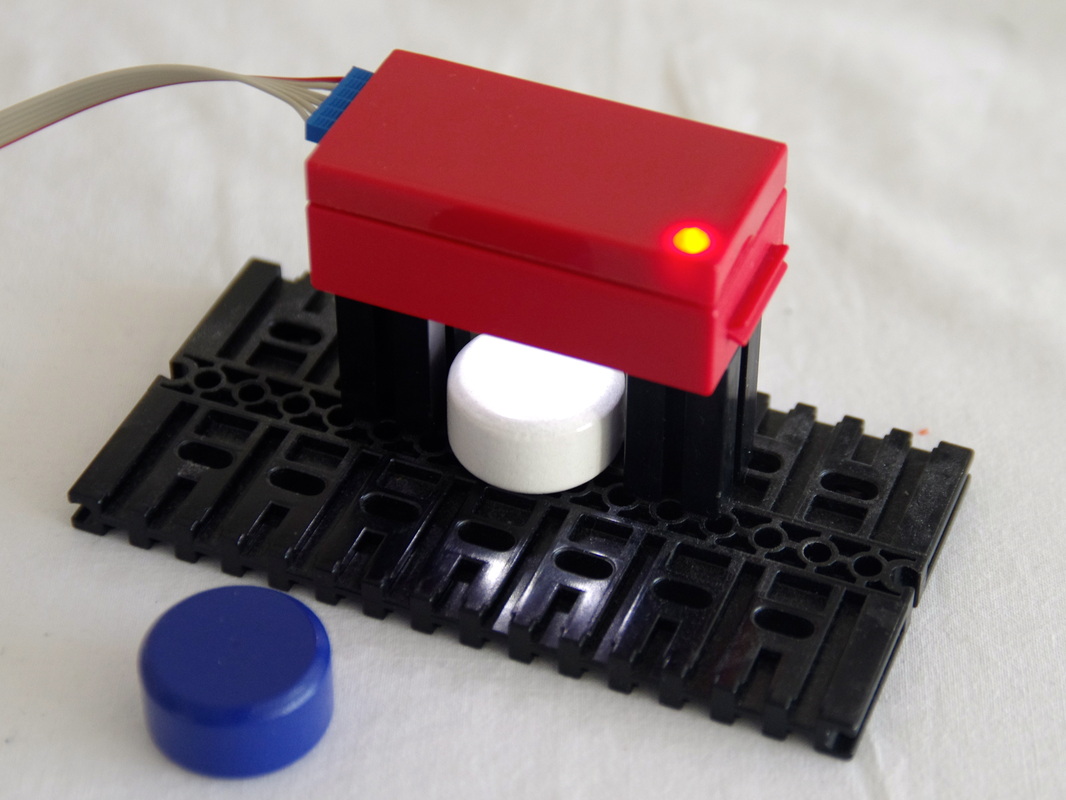
The sensor is finalised, integrated into a standard fischertechnik 9 V battery box and working!
|
|
High Reliability
|
During the Hannover Maker Faire held August 3rd, 2013, the smartColours sensor ran continuously during 10 hours, identified 600 cylinders and failed to recognise the right colour 8 times only.
With a successful rate of 98,7%, the smartColours sensor is thus highly reliable. |
