I²C RFID Smart Sensor smartRFID
|
The smartRFID sensor is a RFID reader. It reads the RFID tag and sends the 5 bytes plus a check-sum through the I²C bus.
This sensor is self-reliant because it relies on a highly integrated RFID reader. • CAUTION Before using this device, please read the specification carefully sheet and check voltage requirements. |
|
Device
- Manufacturer: Rei Vilo
- Break-out provider:
- Specification sheet:
- I²C address: 0x4c
Procedure
|
The smartRFID sensor comes ready to use, with two main functions, RFID_begin and RFID_read.
However, instead of a lengthy RFID unique identifier with 5 bytes, RFID_identify returns a single digit number, much easier to manage. Basically, the RFID_translate function includes a table with checks the 5 bytes of the RFID unique identifier and returns a single digit number. If the RFID tag is unknown, then RFID_translate returns 0. RFID_identify first calls RFID_read to acquire the 5 bytes of the RFID unique identifier and then RFID_translate to translate them into a single digit number. The translation of the RFID unique identifier into a single digit number needs to be set on the RFID_translate function. As RFID_identify first calls RFID_read to acquire the 5 bytes of the RFID unique identifier and then RFID_translate to translate them into a single digit number, the RFID_translate function needs to be set first. The table if the RFID_translate function is edited on Robo Pro and the values are hard-coded. |
Main Functions
|
RFID_begin initialise the sensor
RFID_read read the RFID tag, control the check-sum and returns 5 bytes of the unique RFID identifier
|
Advanced Functions
|
RFID_identify read the RFID tag and return one single digit number associated with the RFID tag
Using RFID_identify requires that the table in RFID_translate is ready and populated. |
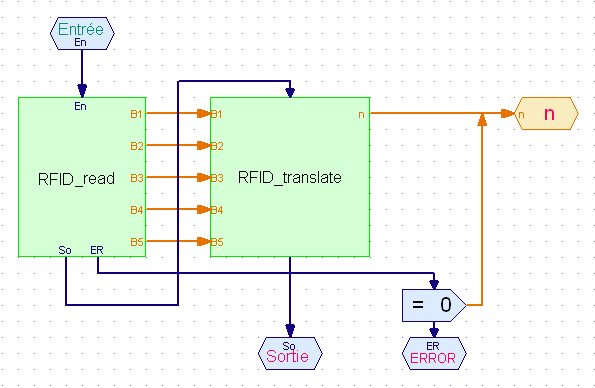
Main RFID_identify function...
|
|
RFID_translate translate the RFID unique identifier into a single digit number
RFID_test test the connection with the sensor
|
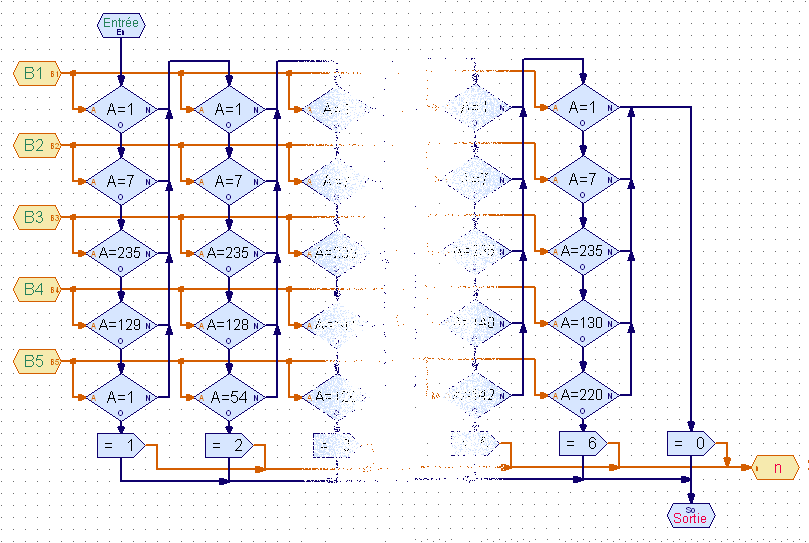
...and the table of RFID_translate
|
Download
|
Download the driver with an example for RoboPro.
This file is under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. |
Posted: 22 Oct 2011
Updated:
Updated:
