Dynamic Propelled Horizontal Device
|
This third model is maybe the most interesting one, because I didn't manage to get it run properly.
So I really appreciate your help and ideas! |
|
First Manual Model
|
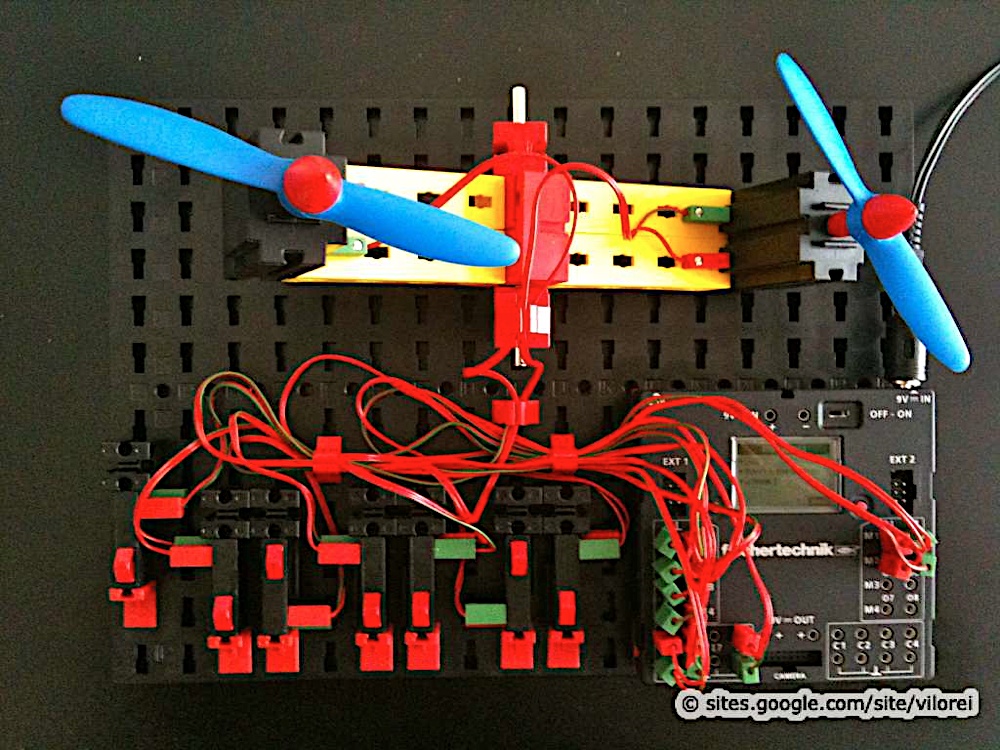
I built first a model with manual controls.
From left to right, bottom:
|
|
|
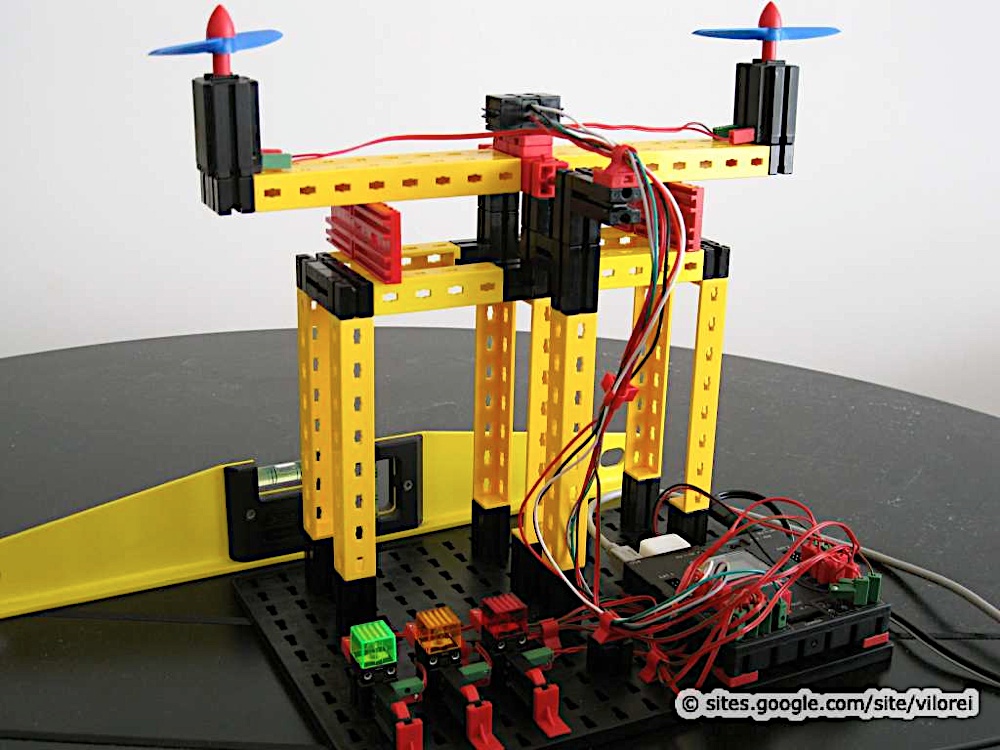
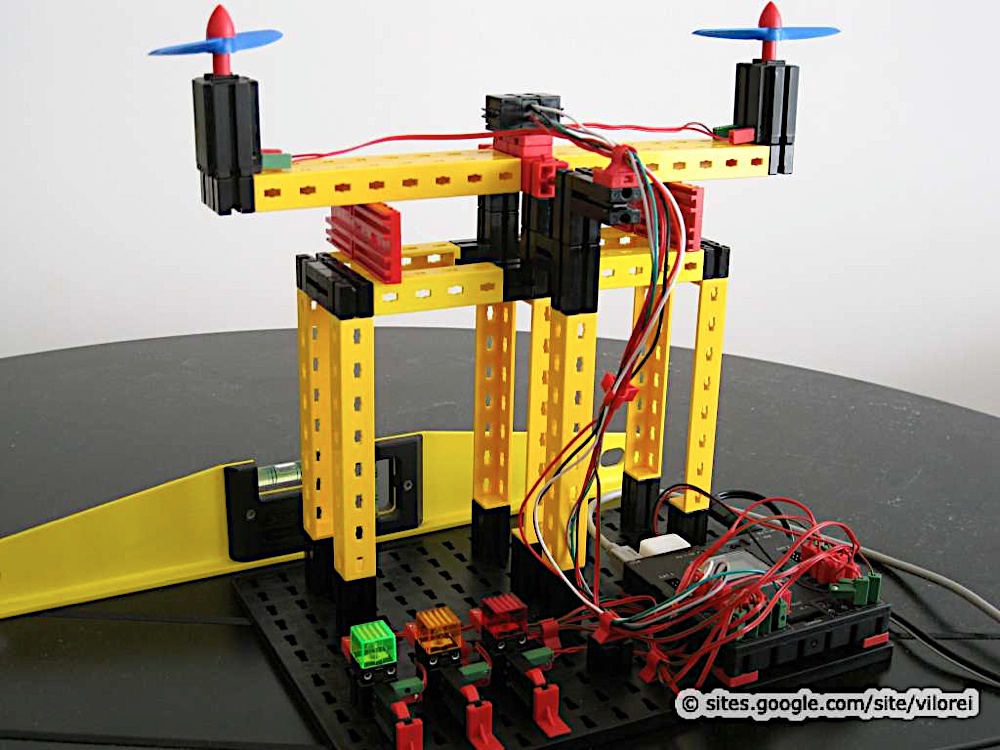
As shown is this picture, the device is horizontal and stays horizontal.
|
|
|
Metal axis is recommended to obtain a frictionless movement of the arm.
I also tried to play with duration on top of speed control, to cope with the inertia of the arm and the propellers. |
|
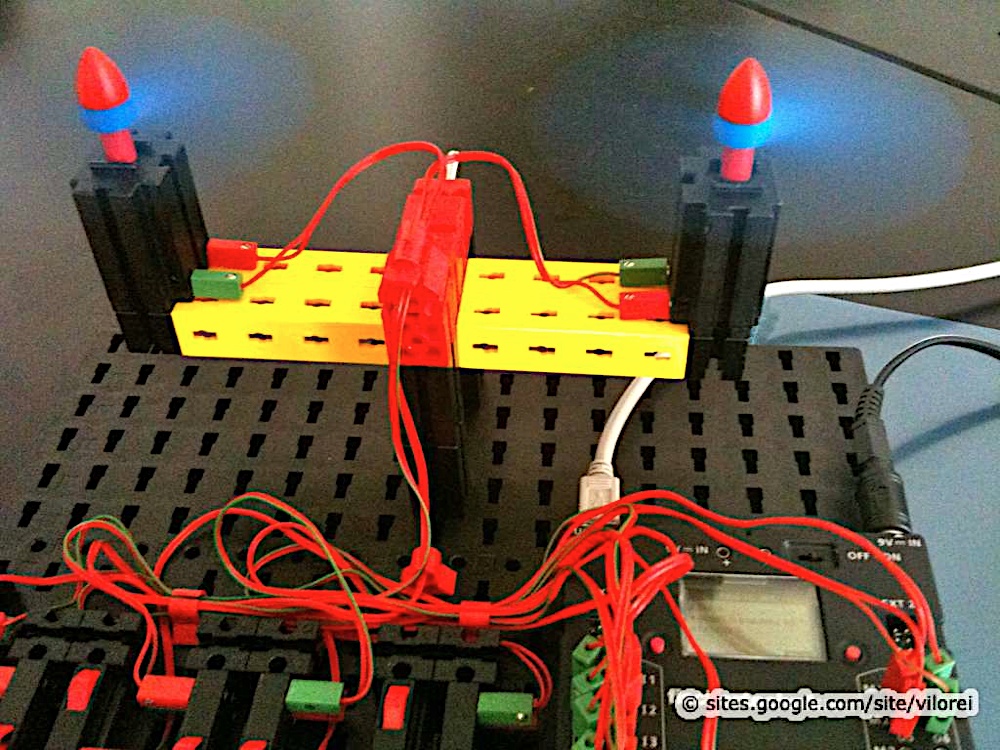
Real Model With Accelerometer
|
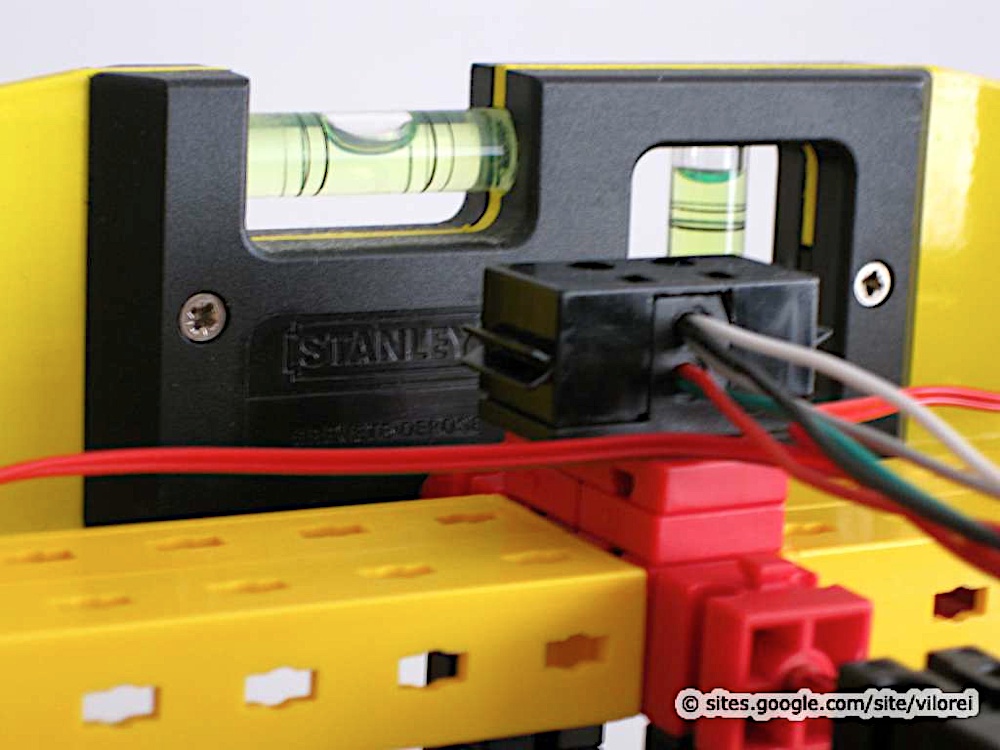
I put the accelerometer on top of the arm and make sure everything's horizontal: the table (left) and the moving arm (right).
|
|
|
|
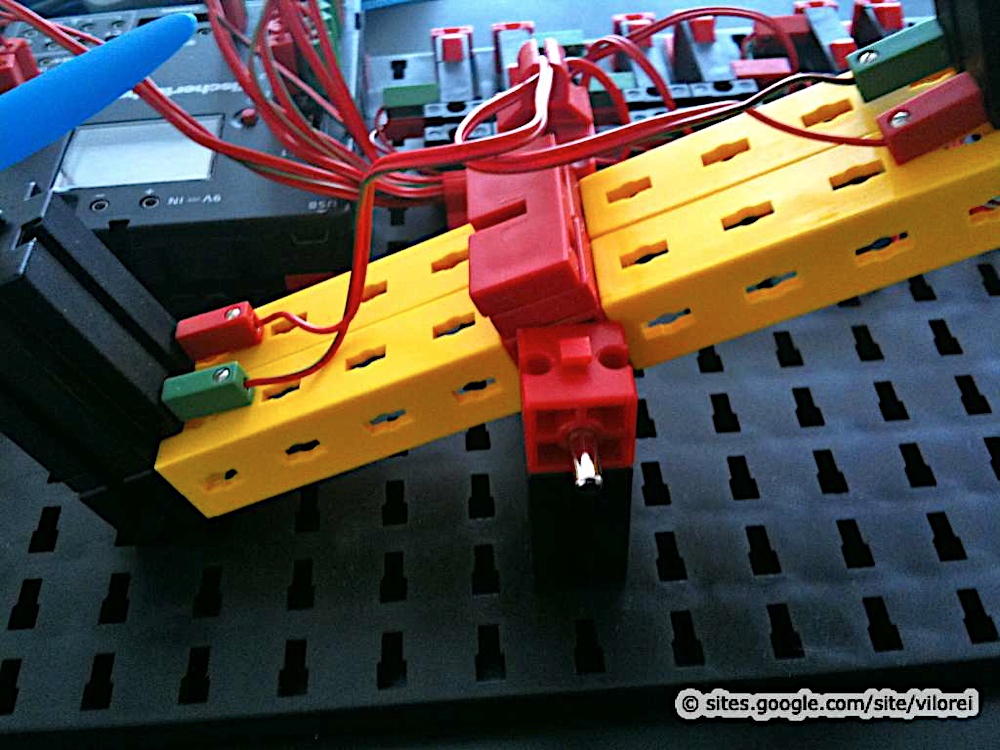
Based on what I observed from the first tests, the length of the arm is critical.
So I increased it to obtain a slower movement, although angular speed remains the same. I played with different configurations of fuzzy logic rules, but I was unable to get the arm horizontal, as shown on the video. I recorded all the data of the video: see next story Help Needed on Bunch of Data. |

|
Previous |
Next |
