X-Y Joystick Remote-Controlled Device
|
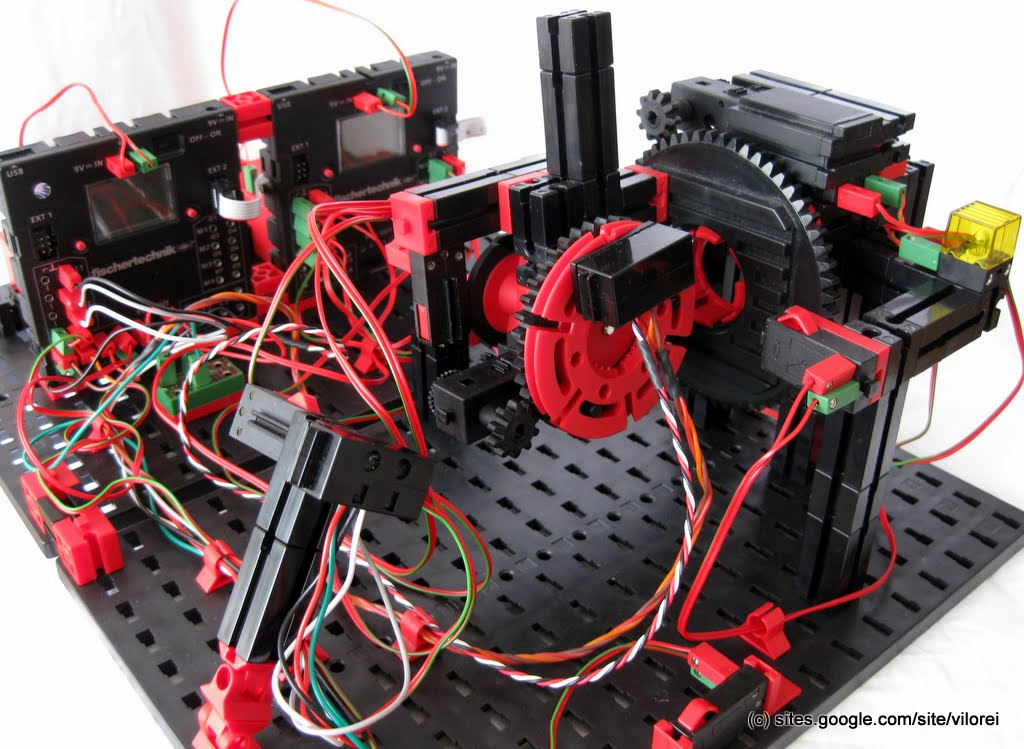
This second model is more complex:
|
|
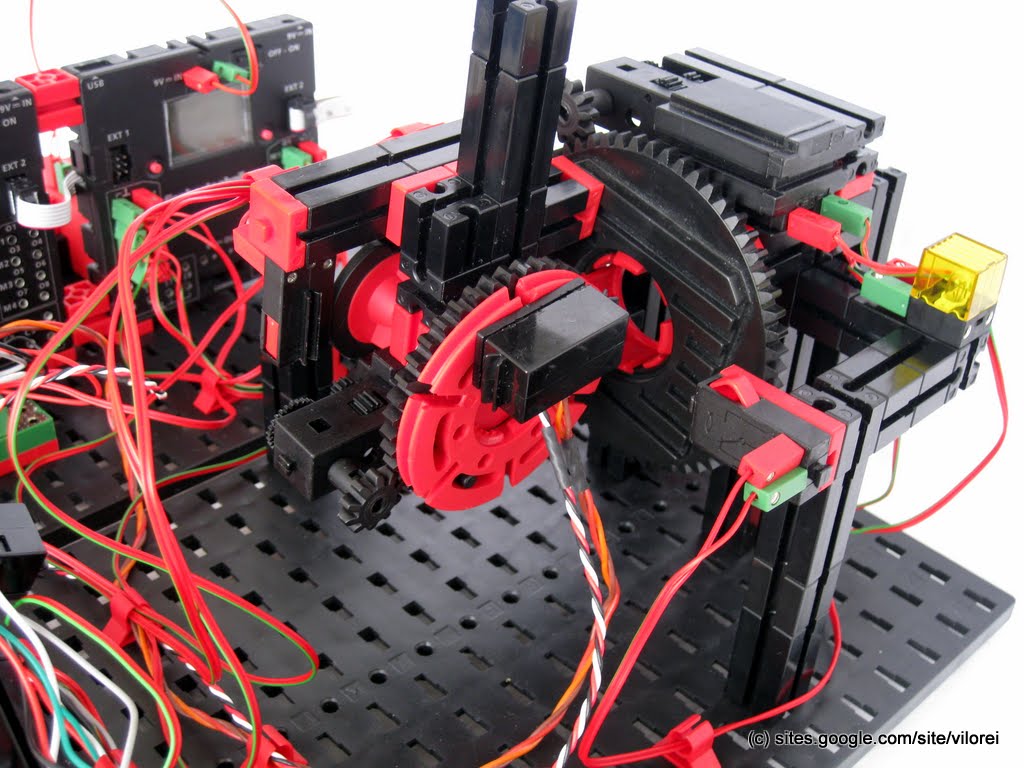
Hardware
|
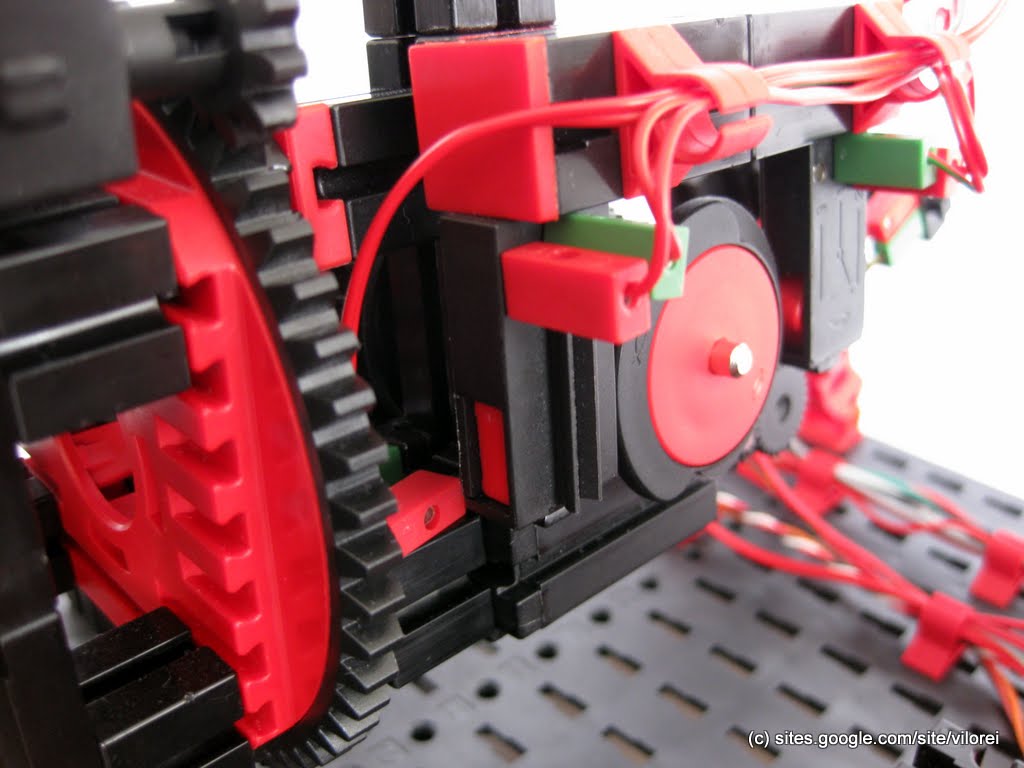
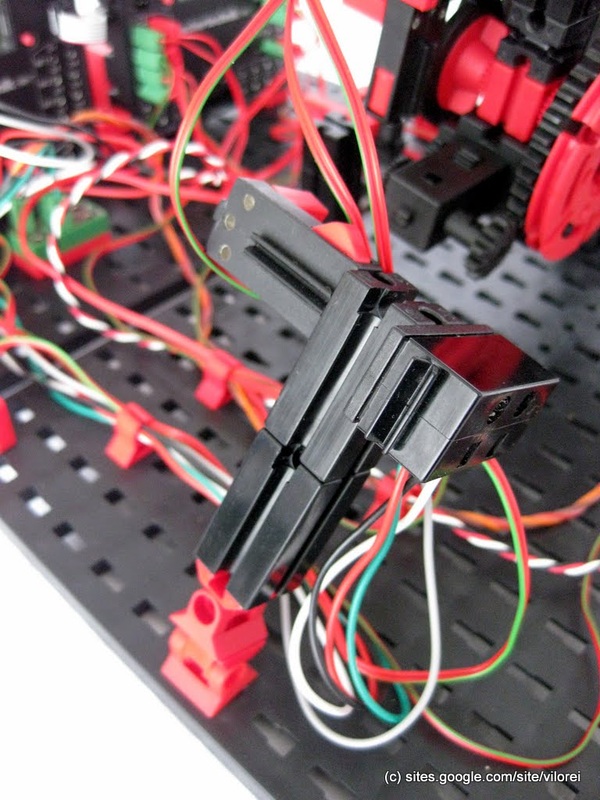
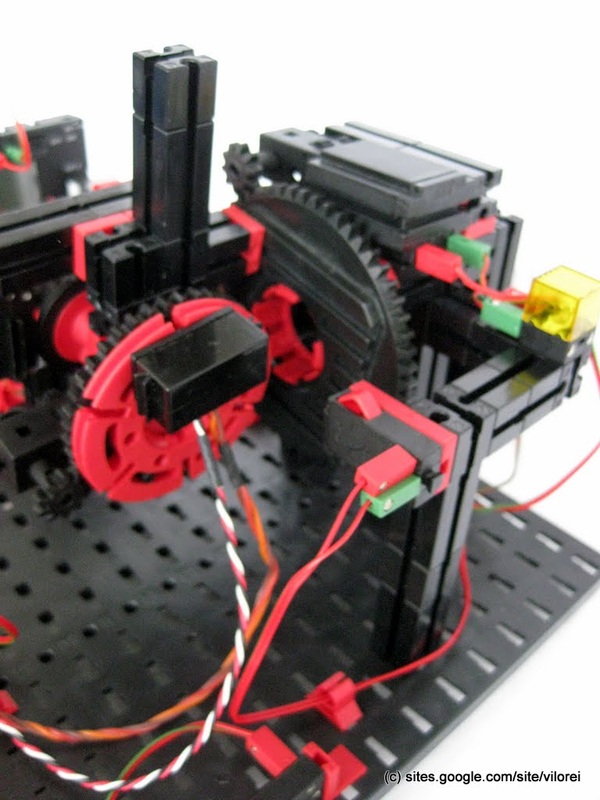
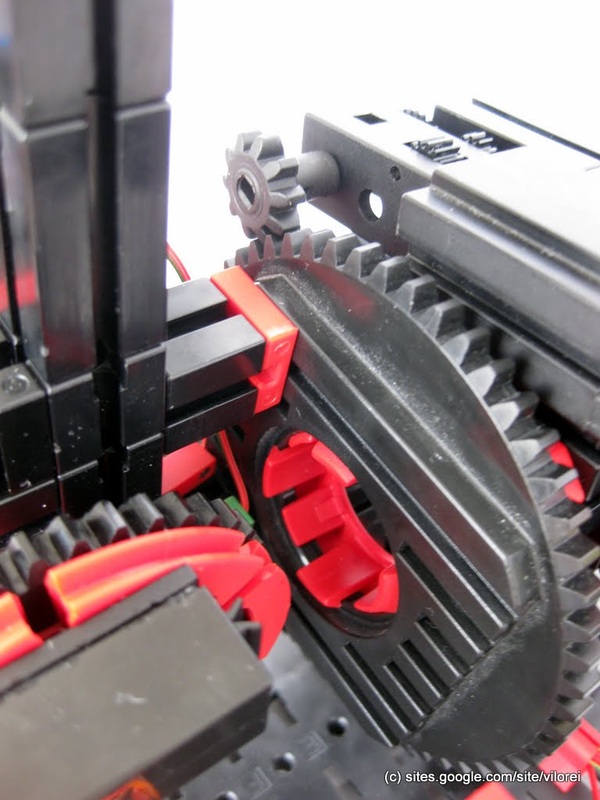
The device consists of two axis, each one with one motor and two end-of-course safety switches.
The yellow lamp shows activity. |
|
|
Below,
|
|
|
|
|
Software
|
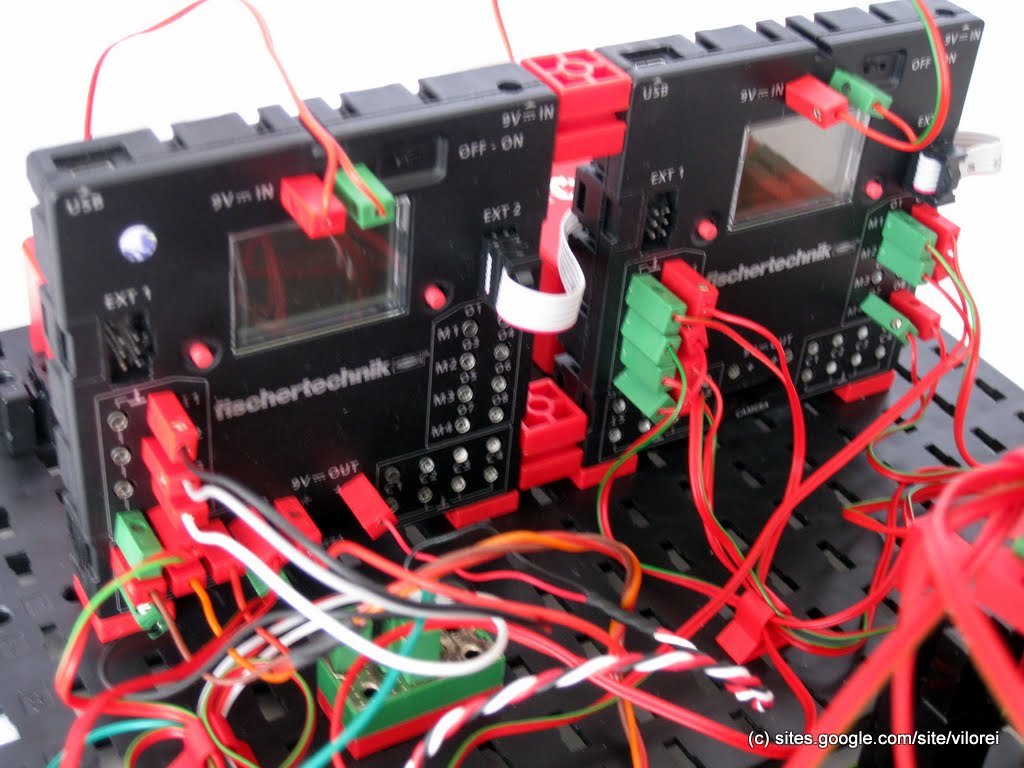
The software is based on the comparison between the values of the two accelerometers and commands the two motors.
It is pretty basic and relies on fuzzy logic with simple rules. However, two TX-Cs are needed: each accelerometer requires 3 A/D inputs, and the device needs 4 end-of-course contacts for safety. |
|
Download
|
The attached file is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
|
| ||
