Step-by-Step Setting
|
The model is the same as in previous pages.
|
Setting the Model
|
The model is the same as in previous pages.
The connections could be tricky, especially for the motors. The software I use is based on the project shared by winijenh on the ft:community forum. Thank you winijenh! The solution relies on a PID controller (reference) and a Kalman filter (reference). Please follow the link for more details, including a ready-to-use Robo Pro project file. So here's my trial and error process:
The model is ready now! |
Setting the PID Controller
|
However, I looked deeper into the PID controller. I used the manual tuning method mentioned here:
Too high values for Kp, Ki and Kd cause instability. Don't hesitate to decrease them. |
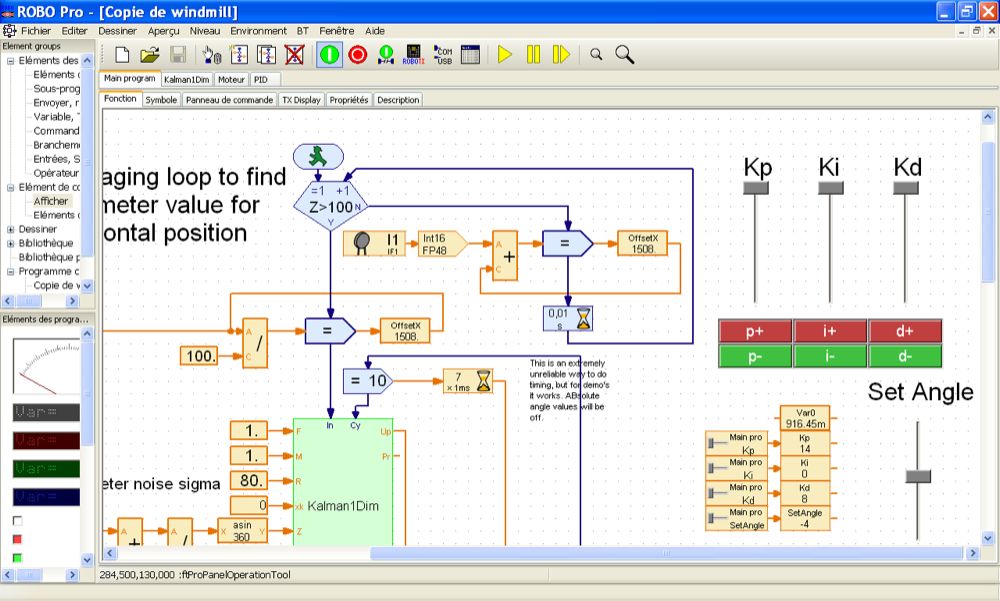
Angle = 0,916 °
|
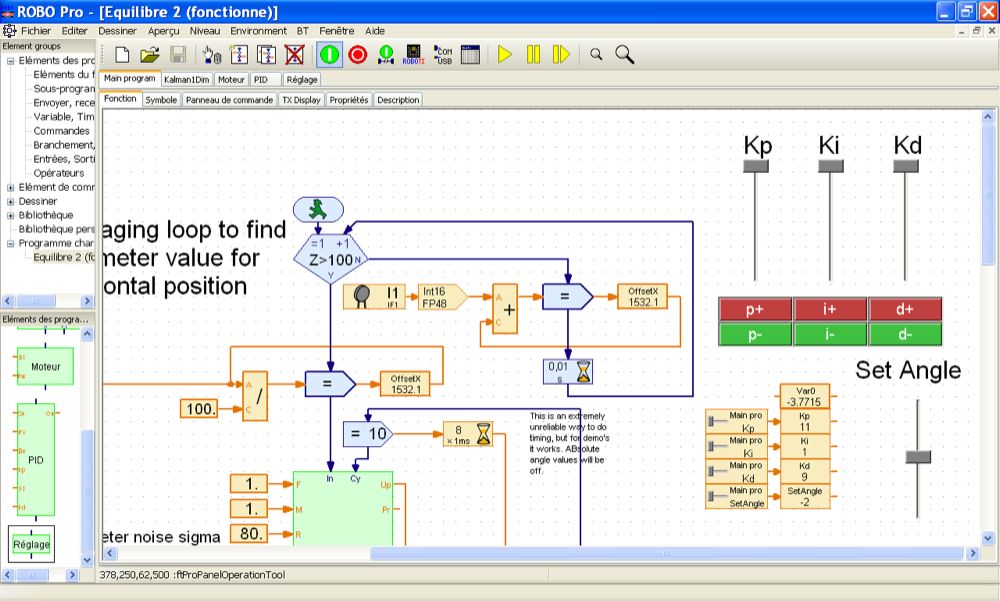
Angle = -3,77 °
|
|
The different sets of values I obtained for a good stability are :
Play with different sets of values to fully understand
Have fun! |
Previous |
Next |
