Software
|
The sensor requires 3 plugs: +9V, ground and signal.
|
|
|
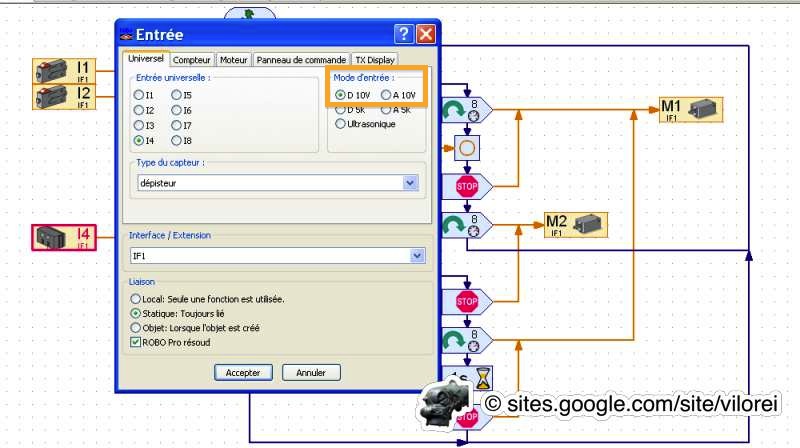
The signal is connected to any universal input of the TX controller.
The input for the sensor should be declared either as Digital 10V like a tracker (below) or as Analog 10V like a colour reader. |
|
I worked with the Digital 10V option. The boolean value makes the use of the sensor very easy.
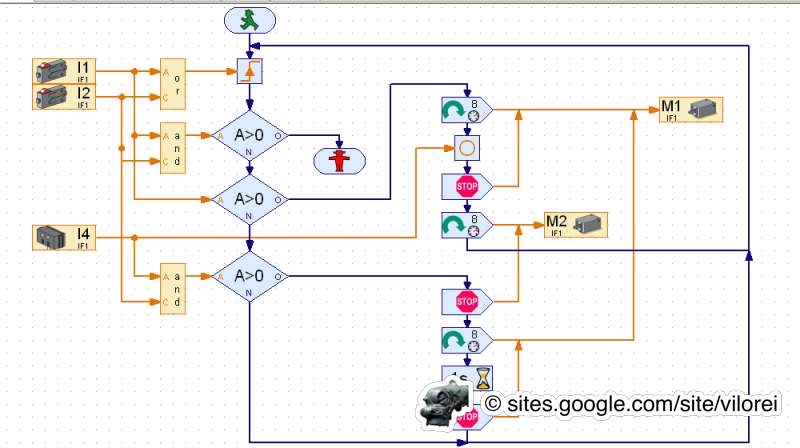
The Robo Pro program is fairly standard and requires no comment. |
|
Using the Digital 10V option gives a value linked to the shade of gray of the object seen by the sensor. Remember, the sensor is monochromatic as the standard fischertechnik colour reader.
Unfortunately but unsurprisingly, this option is not reliable for colour recognition. Instead, consider a true-colour sensor. |
Previous |
